原文:Go sync.Mutex: Normal and Starvation Mode(VictoriaMetrics Blog,2024-08-09)
译文说明: 本文为压缩翻译/节译:保留原文的核心结构(为什么需要 Mutex → 结构 → Lock/Unlock 流程 → 正常/饥饿模式),省略导航、插图与扩展阅读列表;代码块与关键字段名尽量保持原样。
为什么需要 sync.Mutex
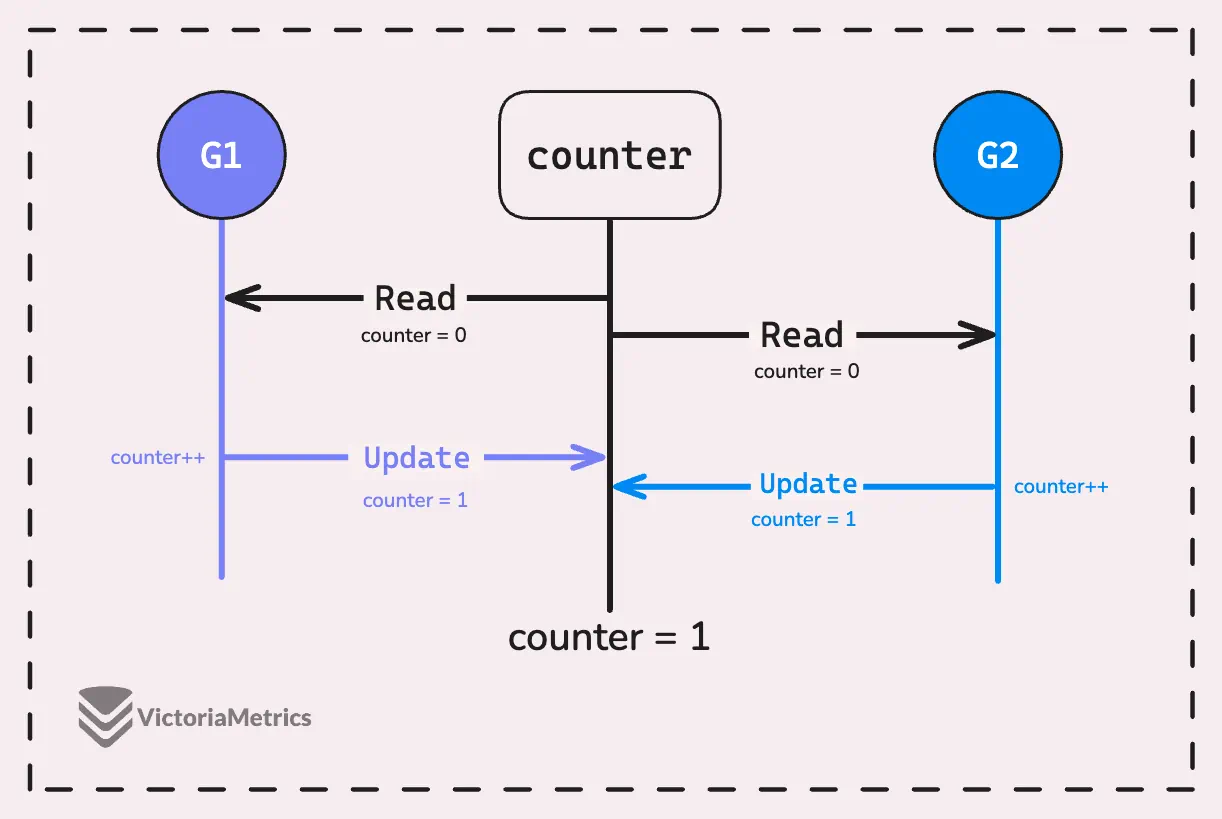
当多个 goroutine 并发读写同一份共享数据(例如 map 或一个计数器)时,如果没有同步保护,就会出现竞态:读-改-写并不是原子操作,导致更新丢失,甚至触发运行时错误(例如并发读写 map)。
一个最常见的例子是计数器递增:counter++ 会被拆成“读取 → 加一 → 写回”,这三步可能被不同 goroutine 交错执行,从而丢失递增。
使用 Mutex 的方式很直接:用 Lock/Unlock 把临界区包起来(工程上通常推荐 defer Unlock(),确保一定释放锁)。
var counter = 0
var wg sync.WaitGroup
var mutex sync.Mutex
func incrementCounter() {
mutex.Lock()
counter++
mutex.Unlock()
wg.Done()
}
func main() {
for i := 0; i < 1000; i++ {
wg.Add(1)
go incrementCounter()
}
wg.Wait()
fmt.Println(counter)
}sync.Mutex 的内部结构(“解剖”)
Go 的 sync.Mutex(内部实现)核心是两个字段:
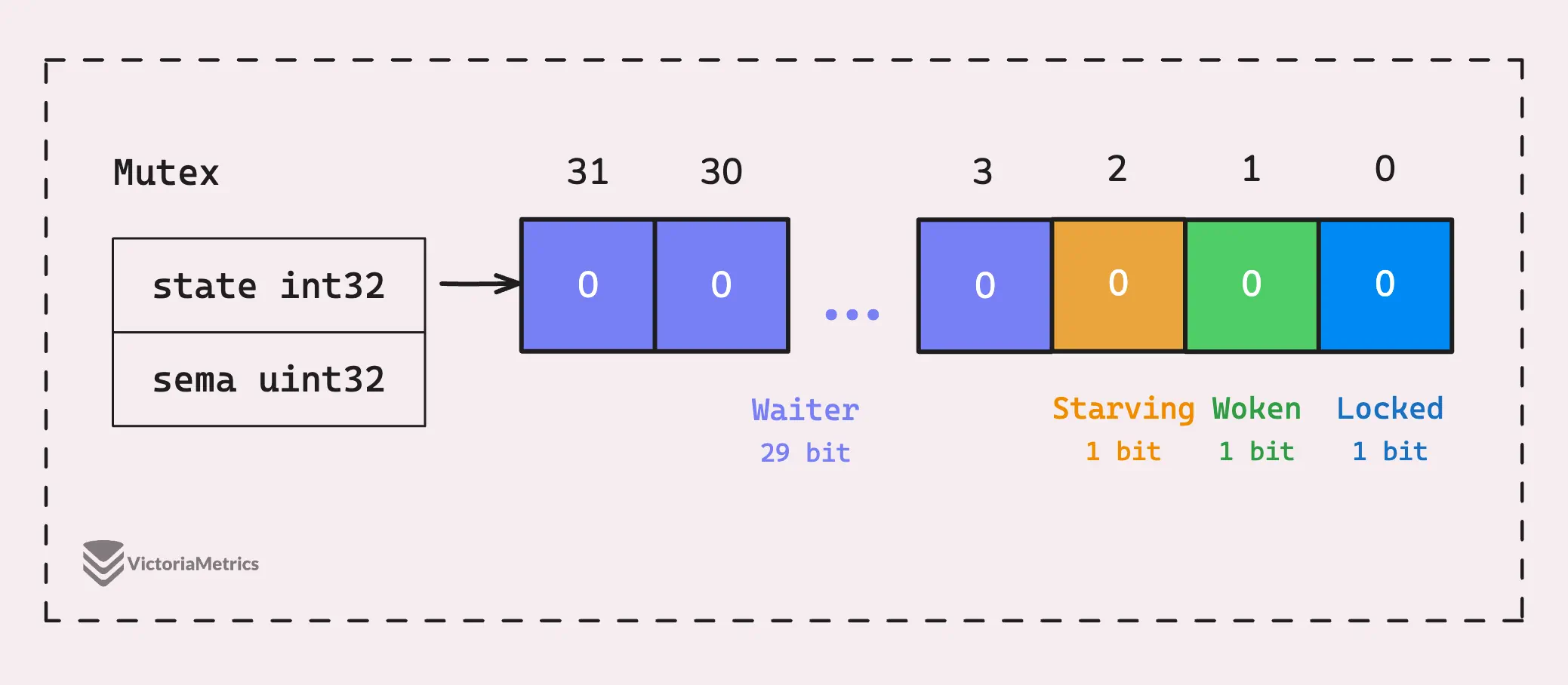
type Mutex struct {
state int32
sema uint32
}state:一个 32-bit 的状态位图(包含若干 flag + 等待者数量)。sema:一个信号量,用来让等待的 goroutine 进入阻塞/被唤醒(由 runtime 内部实现驱动)。
| 位/区间 | 含义 |
|---|---|
bit0 Locked | 是否已加锁(1 表示被持有) |
bit1 Woken | 是否已经唤醒过一个等待者(避免重复唤醒造成惊群) |
bit2 Starving | 是否处于饥饿模式 |
bit3..31 Waiter | 等待者计数(高位存储) |
Lock:快路径与慢路径
Lock() 有两条路径:
- 快路径:无竞争时,用 CAS 把
state从 0 改为locked,成功则立即获得锁(该路径通常会被内联,减少调用开销)。 - 慢路径:CAS 失败说明有人持锁/有等待者,进入更复杂的竞争处理:可能先自旋,再入队阻塞,等待被唤醒后重试。
func (m *Mutex) Lock() {
// Fast path: grab unlocked mutex.
if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) {
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
return
}
// Slow path (outlined so that the fast path can be inlined)
m.lockSlow()
}为什么要自旋(spinning)
慢路径里不会立刻“排队睡觉”,而是先短暂自旋:希望锁在很短时间内释放,从而避免一次完整的睡眠/唤醒带来的调度开销。
但自旋会消耗 CPU:如果机器没有多核或竞争形态不适合,自旋会被限制/禁用。原文示意了 runtime 里用于短暂让出/等待的低级实现(例如 runtime.procyield(30) 一类的循环)。
自旋失败后会发生什么
如果多次自旋仍拿不到锁,goroutine 会:
- 增加等待者计数(进入等待队列)
- 通过信号量进入阻塞
- 被
Unlock唤醒后再来尝试获取锁
正常模式 vs 饥饿模式(公平性与吞吐的取舍)
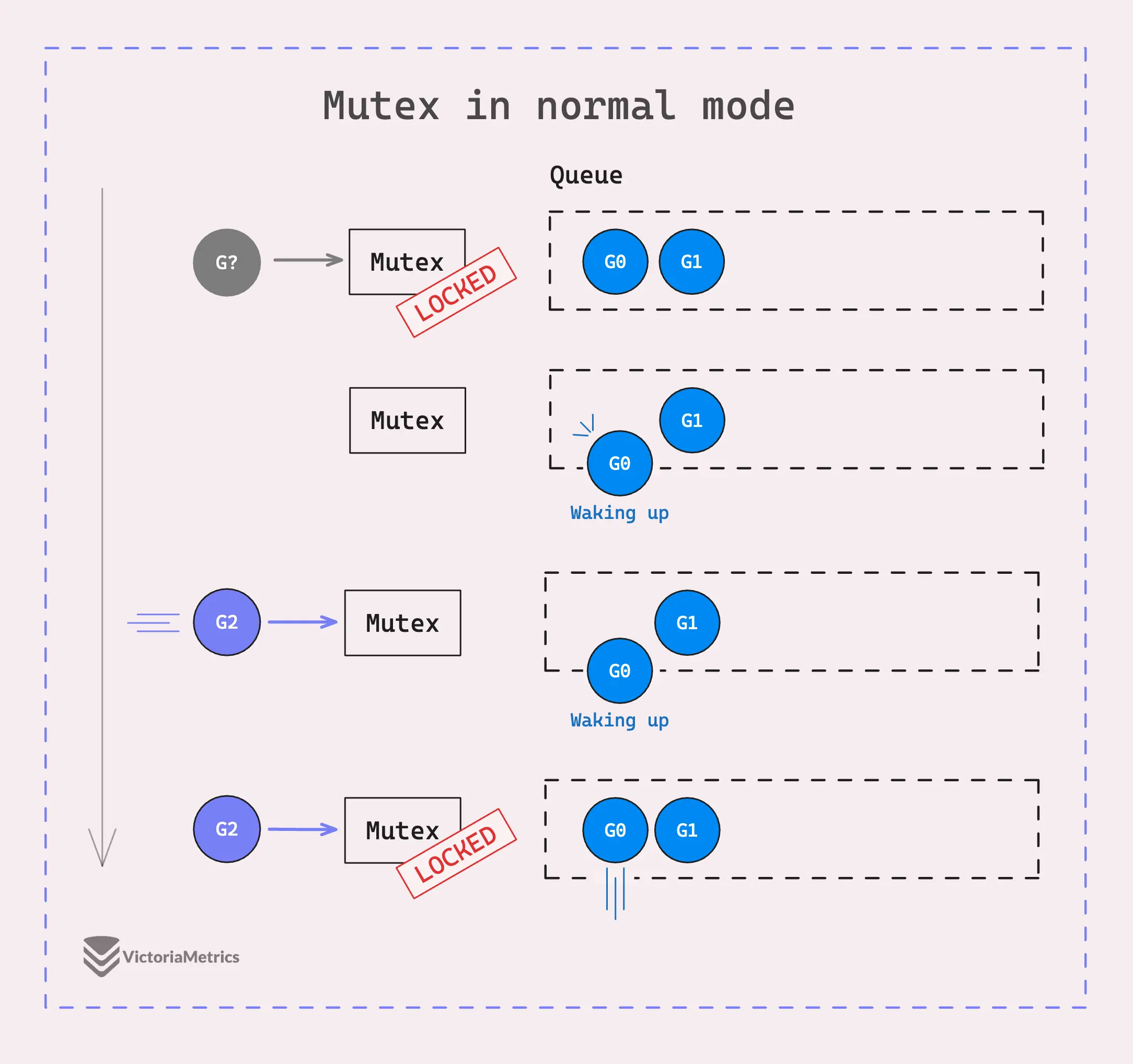
正常模式(Normal)
在正常模式下,被唤醒的等待者并不“保证立即拿到锁”,它需要与新来的 goroutine竞争。由于新来的 goroutine 往往已经在 CPU 上运行,竞争会偏向“新来者”,从而可能出现:某个等待者反复被唤醒但总是抢不到锁,等待时间出现长尾。
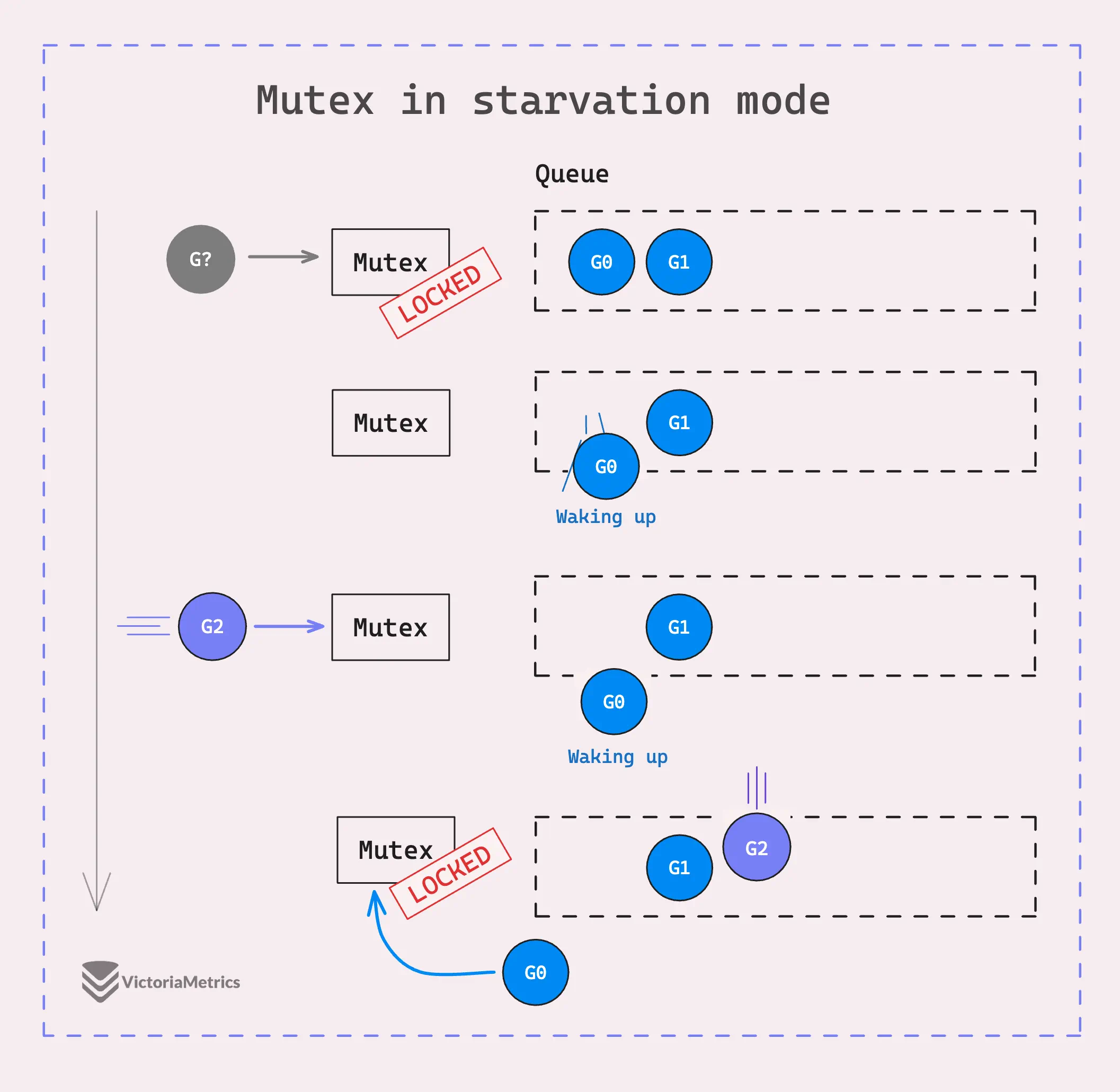
饥饿模式(Starvation)
为避免极端情况下的长尾等待,Go 的 Mutex 会在满足条件时进入饥饿模式。原文给出的触发条件是:某个等待者获取锁失败并等待超过一个阈值(典型是 1ms)。
进入饥饿模式后:
Unlock更倾向于把锁直接交接(handoff)给队首等待者,减少“唤醒后再竞争”的不确定性- 新来的 goroutine 不再尝试抢锁,而是加入队列尾部等待
退出饥饿模式的条件(原文描述)大意是:当队列变短(自己是最后一个等待者)或等待时间已明显变小(<1ms)时,会切回正常模式以恢复吞吐。
Unlock:快路径与慢路径
Unlock() 同样有快/慢路径:
- 快路径:清掉
Locked位;如果清完后state == 0,说明没有等待者等其他标志位,直接返回。 - 慢路径:处理“有等待者”的情况,并区分当前是否处于饥饿模式。
原文对慢路径的要点(压缩译):
- 如果解锁一个未加锁的
Mutex会直接fatal("sync: unlock of unlocked mutex")。 - 正常模式:在满足条件时,减少等待者计数、设置
Woken位,然后通过sema唤醒一个等待者,让它去竞争锁。 - 饥饿模式:更偏向直接 handoff,把“所有权”交给队首等待者(通过 runtime 的信号量 release 实现)。
术语表
| 英文 | 中文 |
|---|---|
| mutex | 互斥锁 |
| goroutine | goroutine(Go 协程) |
| lock / unlock | 加锁 / 解锁 |
| CAS (Compare-And-Swap) | 比较并交换 |
| fast path / slow path | 快路径 / 慢路径 |
| spinning | 自旋 |
| waiter | 等待者 |
| semaphore (sema) | 信号量 |
| starvation mode | 饥饿模式 |
| normal mode | 正常模式 |
| handoff | 交接(直接把锁交给等待者) |
译者注(易混点)
- “饥饿模式更公平”并不等于“严格 FIFO”:它是在高竞争长尾场景下倾向于交接队首等待者,以限制等待时间上界;整体策略仍会在“吞吐 vs 公平”之间动态切换。
- 原文提到
TryLock,但本文未展开;面试语境通常关注Lock/Unlock与两种模式的设计动机即可。